Кинематический расчет привода
Исходные данные:
мощность на ведомом валу привода ![]() ,
,
частота вращения ведомого вала ![]() ,
,
передаточное число редуктора ![]() ,
,
кинематическая схема 1.5[1].
Выбор электродвигателя.
Определяем требуемую мощность на валу двигателя:
 ;
;
где ![]() КПД привода,
КПД привода, ![]() - КПД ременной, и 2х цилиндрических зубчатых передач соответственно.
- КПД ременной, и 2х цилиндрических зубчатых передач соответственно.


Выбираем двигатель 4А160S6УЗ [2] стр.27, мощностью 11,0кВт; асинхронная частота вращения 975.
Определяем асинхронную частоту вращения:

Определяем угловую скорость двигателя:
![]()

Определение передаточного числа привода, и отдельных передач.
Определяем передаточное число привода:

Определяем передаточное число цилиндрической зубчатой передачи:
![]()
принимаем 4,0

Определяем передаточное число ременной передачи:

Расчет кинематических параметров на каждом валу привода.
Определяем мощности на валах привода:

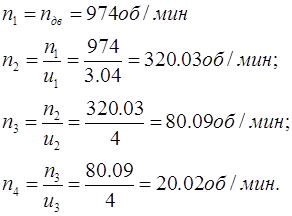
Определяем частоту вращения каждого вала:
Определяем угловую частоту вращения каждого вала:


Определяем крутящие моменты на валах привода:

Результаты кинематических расчетов сводим в таблицу:
Таблица №1
|
№вала |
Р кВт |
n об/мин |
|
Т Нм |
|
1 |
10,9 |
947 |
101,9 |
100 |
|
2 |
10,46 |
320,1 |
33,51 |
312 |
|
3 |
10,15 |
80,1 |
8,37 |
1210 |
|
4 |
9,84 |
20 |
2,09 |
4708 |
Популярное на сайте:
Расчет годовой производственной программы
Расчет годовой производственной программы по ТО и КР. После расчета коэффициента технической готовности парка, расчета годового пробега автомобилей, рассчитывается количество капитальных ремонтов за год и технических обслуживаний по видам () за год. При этом имеют ввиду, что при пробеге автомобиля ...
Технология работы сортировочного парка и вытяжных
путей
Специализация путей в сортировочном парке На односторонних сортировочных станциях пути сортировочного парка удобно разбивать на две группы, используя одну из них для четного, другую – для нечетного вагонопотоков. Рекомендуется выделять по одному сортировочному пути для каждого назначения одногрупно ...
Определение степени подвижности плоского механизма
Степень подвижности плоских механизмов определяется по формуле П. Л. Чебышева: W = 3n – 2P5 – P4 (1.1) где: W – степень подвижности механизма; n – число подвижных звеньев механизма; P5 – число кинематических пар пятого класса; P4 – число кинематических пар четвертого класса. Степень подвижности мех ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт