Определение обстоятельств встречи и элементов движения целей
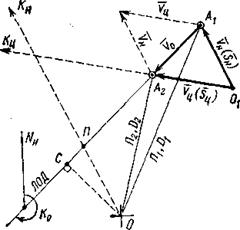
Рис. 2.2. Прокладка в относительном движении
При ведении прокладки в относительном движении также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме – точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную Vц до пересечения с ЛОД.) Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения место положения эхо-сигнала в точке А2 промежутка времени tпер:
![]()
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т.е. DKP и tKP, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений – относительного ![]() и нашего судна
и нашего судна![]() или
или ![]()
Учитывая коммутативность суммы векторов ![]() можно находить
можно находить![]() двумя способами.
двумя способами.
Построение векторного треугольника (см. рис 2.2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
Прокладка в относительном движении выполняется на радиолокационном маневренном планшете, представляющем собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала.
Популярное на сайте:
Сопоставление вариантов по приведенным затратам и выбор наиболее эффективного
вида транспорта
Определив приведенные расходы на перевозку заданного груза железнодорожным и автомобильным транспортом, выбираем тот, у которого эти расходы меньше. В нашем примере приведённые расходы при железнодорожном варианте перевозок Приведенные расходы при прямой автотранспортной доставке грузов Таким образ ...
Выбор основных унифицированных узлов вагона
Ходовой частью вагона служат две двухосные грузовые тележки модели 18-755. Тормозное оборудование: В состав тормозного оборудования входит воздухораспределитель 270-005-1 или 483.000 с авторежимом № 250-А-000; запасный резервуар объемом 78 л; тормозная магистраль; главная магистраль; разобщительный ...
Конструктивные особенности устройства контактной сети с экранированным и
усиливающим проводами
Для наиболее эффективного использования системы электроснабжения контактной сети переменного тока напряжением 27,5 кВ с ЭУП необходимо максимальное сближение проводов цепной подвески с рельсовой цепью. В основу разработки конструктивных особенностей схемы соединения проводов и элементов устройства ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт